How to run GeoYolo-SLAM
1.首先进入环境之后将python版本调整到python3.8.0: sudo update-alternatives --config python 2.进入./src/ultralytics_ros之后进入ultralytics_ros环境: pipenv shell 3.重新开启一个命令窗口,同样的步骤进入ultralytics_ros环境 4.在第一个窗口中将python版本调整到python2.7.0: sudo update-alternatives --config python 5.返回工作区catkin_make 6.第一个命令窗口sourse: source ~/cv_bridge_ws/install/setup.bash source devel/setup.bash --extend 7.在第一个命令窗口 roslaunch ultralytics_ros action_server.launch 8.在第二个命令窗口 roslaunch rds_slam tum_segnet_walk_static.launch (因为环境问题运行单次可能会出现闪退,因此将循环命令写入.sh文件)
Introduction
The scene rigidity is a strong assumption in typical visual Simultaneous Localization and Mapping (vSLAM) algorithms. Such strong assumption limits the usage of most vSLAM in dynamic real-world environments, which are the target of several relevant applications such as augmented reality, semantic mapping, unmanned autonomous vehicles, and service robotics.
Many solutions are proposed that use different kinds of semantic segmentation methods (e.g., Mask R-CNN, SegNet) to detect dynamic objects and remove outliers. However, as far as we know, such kinds of methods wait for the semantic results in the tracking thread in their architecture, and the processing time depends on the segmentation methods used.
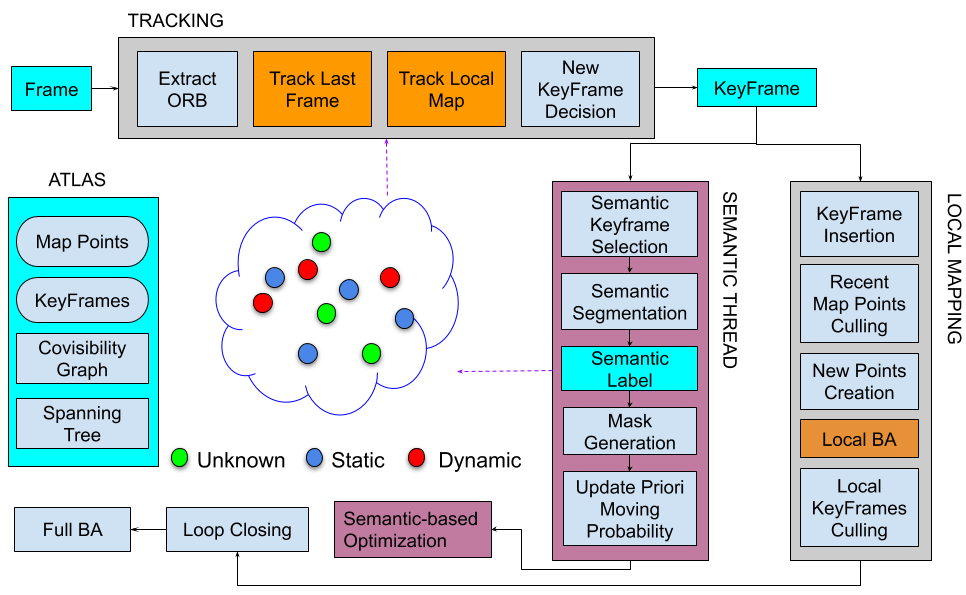
In this paper, we present RDS-SLAM, a real-time visual dynamic SLAM algorithm that is built on ORB-SLAM3 and adds a semantic thread and a semantic-based optimization thread for robust tracking and mapping in dynamic environments in real-time. These novel threads run in parallel with the others, and therefore the tracking thread does not need to wait for the semantic information anymore. Besides, we propose an algorithm to obtain as the latest semantic information as possible, thereby making it possible to use segmentation methods with different speeds in a uniform way. We update and propagate semantic information using the moving probability, which is saved in the map and used to remove outliers from tracking using a data association algorithm.
This repo is a simplified sample source code of RDS-SLAM. Note that it is not exactly as the same as the paper.
Demo
- Real Environment
- Mask R-CNN + Kinect: https://youtu.be/-peAZEO6Bbo
- TUM Dataset (Mask R-CNN)
- walk xyz: https://youtu.be/P-dew4M5Un0
- TUM Dataset (SegNet)
- walk xyz: https://youtu.be/7E7Y5ER11B8
Develop environments
- ubuntu: 18.04
- ROS melodic
- docker: 19.03 [optional]
- dock-compose: 1.26.2 [optional]
- cuda: 10.2
- OpenCV 3.3.1
How to use
How to deploy using docker
cd docker
docker-compose bulid
docker-compose up
How to deploy on the local machine
We recommand using the docker virtual machine. Please build the dependencies sequentially if you want to build on your local machine:
- SegNet_ROS
- MaskRCNN_ROS
- SLAM
How to build SLAM client
catkin_ws is a ROS workspace.
cd ~/catkin_ws/src/SLAM/
./build_thirdparty.sh
cd ~/catkin_ws
catkin_make
How to run demo
roslaunch segnet_ros action_server.launch
[Important] Please run w/static to initialize GPU before you evaluate any datasets.
roslaunch rds_slam tum_segnet_walk_static.launch
roslaunch rds_slam tum_segnet_walk_xyz.launch
Dataset
- Let docker access your dataset if you use docker
vim docker/.env
DATASET_DIR=/.../data/Dataset
- TUM dataset RDS-SLAM evaluated using the TUM dataset Please download the TUM dataset sequences. Please check the folder path and change the folder path in the launch files and docker configuration if available.
- KITTI dataset In principle, RDS-SLAM support mono camera and stereo camera. We will try to enable and evaluate them later.
Notes
- [Important] please run a dataset to initialize the GPU before you evaluate the time and tracking performance.
- Please use the data listed in the original paper because the tracking performance and real-time performance is somehow related to the GPU and CPU configuration
- The real-time performance and tracking performance can be trade off by controlling the frame rate by adjusting some parameters in the SLAM main loop.
- The framerate can be controlled from offline to 30HZ. But you need to trade off the tracking performance and real-time performance.
- Either SegNet or Mask R-CNN version can be kicked off at a time.
- [Semantic mapping] please refer RTS-vSLAM if you want to build the semantic map. RTS-vSLAM: Real-time Visual Semantic Tracking and Mapping under Dynamic Environments
References
[1] Y. Liu and J. Miura, "RDS-SLAM: Real-Time Dynamic SLAM Using Semantic Segmentation Methods," in IEEE Access, vol. 9, pp. 23772-23785, 2021, doi: 10.1109/ACCESS.2021.3050617. PDF
[2] Y. Liu and J. Miura, “RDMO-SLAM: Real-Time Visual SLAM for Dynamic Environments Using Semantic Label Prediction With Optical Flow,” IEEE Access, vol. 9, pp. 106981–106997, 2021, doi: 10.1109/ACCESS.2021.3100426. PDF
[3] Y. Liu and J. Miura, "KMOP-vSLAM: Dynamic Visual SLAM for RGB-D Cameras using K-means and OpenPose," 2021 IEEE/SICE International Symposium on System Integration (SII), 2021, pp. 415-420, doi: 10.1109/IEEECONF49454.2021.9382724. PDF
[4] Badrinarayanan, Vijay, Alex Kendall, and Roberto Cipolla. "Segnet: A deep convolutional encoder-decoder architecture for image segmentation." IEEE transactions on pattern analysis and machine intelligence 39.12 (2017): 2481-2495. PDF
[5] Campos, Carlos, et al. "ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual–Inertial, and Multimap SLAM." IEEE Transactions on Robotics (2021). PDF
[6] He, Kaiming, et al. "Mask r-cnn." Proceedings of the IEEE international conference on computer vision. 2017. PDF
License
-
ORB-SLAM3 ORB-SLAM3 is released under GPLv3 license. For a list of all code/library dependencies (and associated licenses), please see Dependencies.md.
-
Pangolin MIT License
-
SegNet_ROS: A ROS version of SegNet. SegNet_ROS is released under GPLV3. We used SegNet-Tutorial.
-
RDS-SLAM: RDS-SLAM is released under GPLv3 license. The code/library dependencies is the same as ORB_SLAM3.
Discussion
- The tracking performance is somehow influenced by the GPU and CPU configuration. This will result in unstable tracking in some devices. In such case, please lower the framerate by adjusting the prameters in the SLAM end.
- RDS-SLAM did not obviously deal with the unkown objects that not belonging to the predefined objects. The geometric cleck in G2o/BA can detect and remove some outliers. KMOP-vSLAM is a solution that can deal with unknown objects.
TODO
- seperate SegNet and MasK R-CNN from SLAM client