66 lines
2.0 KiB
Markdown
66 lines
2.0 KiB
Markdown
**一.ROS**:
|
||
|
||
1.学习ROS的相关概念和基础机制。
|
||
|
||
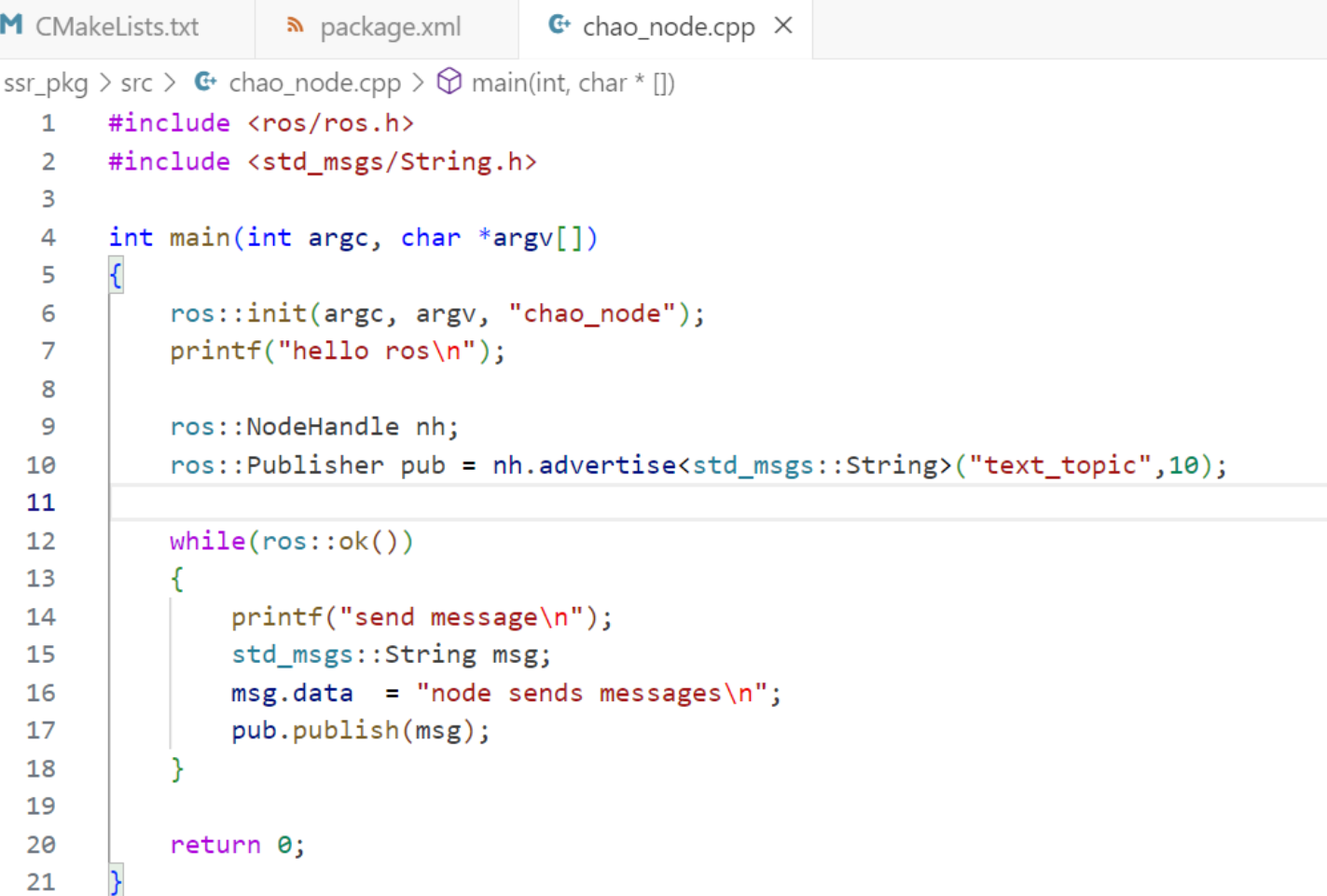
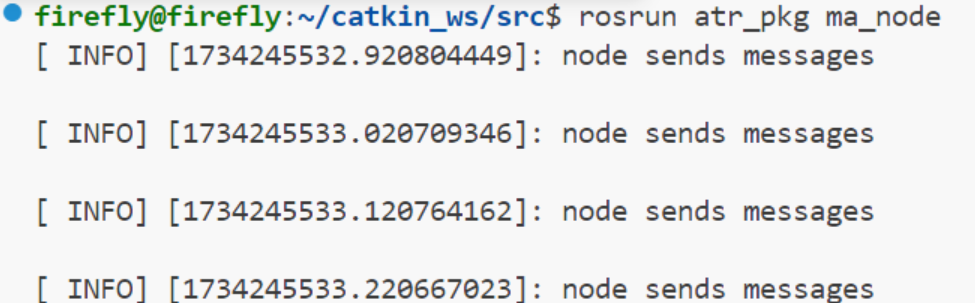
2.在ROS系统编写节点,用节点发布话题并发送信息。用另外的节点订阅该话题并接收信息:
|
||
|
||
|
||
|
||
|
||
|
||
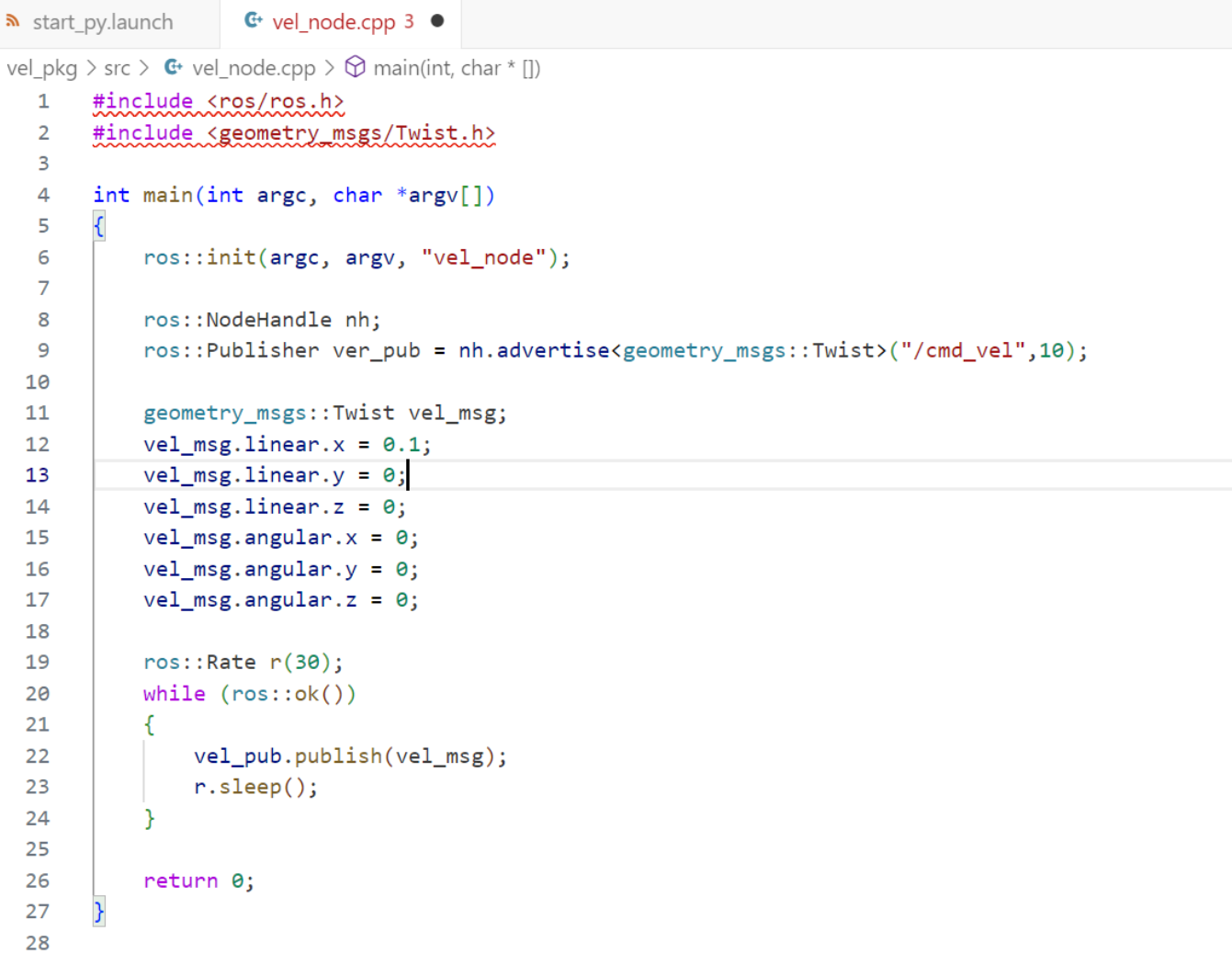
3.实现在ROS系统中,通过编写节点发布速度控制信息,控制gazebo仿真工具中的机器人运动:
|
||
|
||
|
||
|
||
4.实现在ROS系统中,编写节点接收激光雷达测得的信息:
|
||
|
||

|
||
|
||
5.实现ROS系统中,编写节点,接收雷达测得的信息之后,发布运动控制信息,完成避障功能:
|
||
|
||
```c++
|
||
#include <ros/ros.h>
|
||
#include <sensor_msgs/LaserScan.h>
|
||
#include <geometry_msgs/Twist.h>
|
||
|
||
ros::Publisher vel_pub;
|
||
|
||
void LidarCallback(const sensor_msgs::LaserScan msg)
|
||
{
|
||
float fMidDist = msg.ranges[180];
|
||
ROS_INFO("前方测距 ranges[180] = %f m", fMidDist);
|
||
geometry_msgs::Twist vel_cmd;
|
||
|
||
//如果前方障碍物的距离小于1.5米,则以0.3弧度/秒的速度旋转
|
||
if(fMidDist < 1.5)
|
||
{
|
||
vel_cmd.angular.z = 0.3;
|
||
}
|
||
else //否则向前的速度为0.05米/秒
|
||
{
|
||
vel_cmd.linear.x = 0.05;
|
||
}
|
||
vel_pub.publish(vel_cmd);
|
||
}
|
||
|
||
int main(int argc, char *argv[])
|
||
{
|
||
setlocale(LC_ALL,"");
|
||
ros::init(argc, argv, "lidar_vel_node");
|
||
ros::NodeHandle n;
|
||
ros::Subscriber lidar_sub = n.subscribe("/scan", 10, &LidarCallback);
|
||
|
||
vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel", 10);
|
||
|
||
ros::spin();
|
||
return 0;
|
||
}
|
||
```
|
||
|
||
**二.实验**
|
||
|
||
观摩师兄做实验,了解lighthouse的使用流程。下载steamVR,并完成了相关配置。
|
||
|
||

|
||
|