|
|
||
|---|---|---|
| .. | ||
| image | ||
| include/sort_test | ||
| src | ||
| README.md | ||
README.md
Yolov5s+SORT(卡尔曼+匈牙利)
利用目标跟踪对检测框进行预测的技术,对目标检测任务进行加速,在yolov5检测的帧之间穿插使用卡尔曼滤波进行目标检测框的预测,减少对模型的调用,实现目标检测帧率提升的目的。
代码运行环境:
| 开发环境 | rk3588 |
|---|---|
| OpenCV | opencv-3.4.3-windows |
| 调用模型 | YOLOv5s.rknn |
主要代码设置:
环境配置:
进入到ROS环境主目录中
catkin_make #编译程序
source devel/setup.bash #更新ROS工作环境变量
rosrun sort_test sortmain #运行SORT加速检测代码
sudo cat /sys/kernel/debug/rknpu/load #查看npu占用
消耗时间分析
对于摄像头显示的画面(双目摄像头)
读取摄像头画面需要花费1~3ms,60~100ms,(两种极端,忽快忽慢)
检测需要花费40ms(40ms上下幅度,±不超过5ms)
使用跟踪加速的情况下,跟踪算法花费时间15ms(根据目标框数量,±5ms)
标记检测框需要花费0.05ms(多个putText的操作,消耗时间可忽略不计)
双目匹配花费50~140ms(出现波动)
帧率显示大约花费0.03ms(单个putText的操作,消耗时间可忽略不计)
imgshow大约花费3.5ms(单帧图像imgshow的操作)
视频读取分析
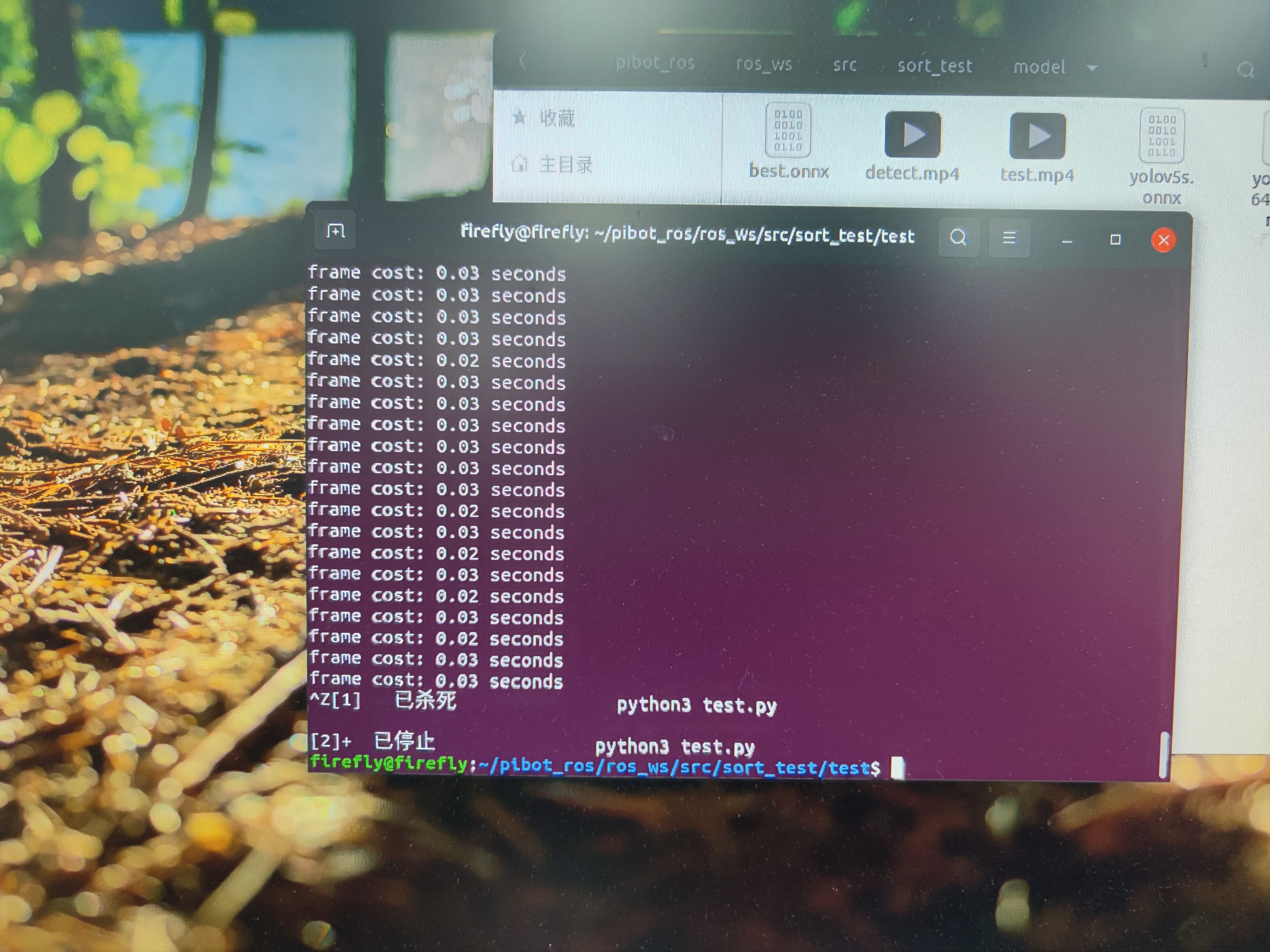
使用python opencv读取一段视频,仅进行读取,消耗时间在25ms左右。
使用c++ opencv读取一段时间,仅进行读取,消耗时间在30ms左右,但也有40ms+和50ms+以及10ms的情况,不太稳定。
c++不添加指定帧率(cap.set(cv::CAP_PROP_FPS, 30)),读取帧率速度花费时间会很长,不添加指定帧率的情况下读取一帧需要200ms。